
Силы, действующие на управляемые колеса
Рассмотрим случай, когда ведущими являются колеса задней оси. Касательная сила тяги задних колес передается на остов автомобиля в виде равнодействующейРк, направленной вперед вдоль оси машины (рис.10).
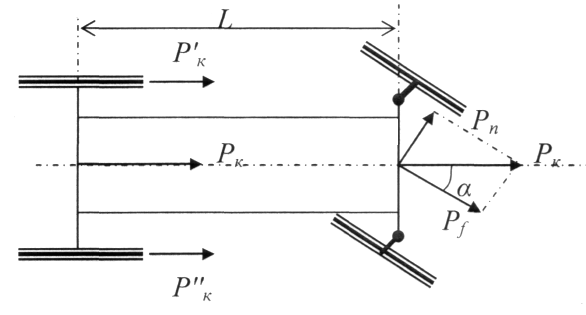
Рис.10. Схема сил, действующих на управляемые колеса заднеприводного автомобиля.
Эта сила передается на передний мост и передние колеса. В пятне контакта передних колес с дорогой возникают реакции. Равнодействующая этих реакций Rкравна толкающей силеРк.
Составляющая Рfтолкающей силыРкзатрачивается на преодоление силы сопротивления качению колес. СилаРfзависит от угла поворота колесα. Из рис. 10 видно, что при одинаковой толкающей силеРксоставляющаяРf(Рf=Рк · cosα) меньше при более крутом повороте.
Известно, что сила сопротивления качению колеса, повернутого под углом к направлению движения, повышается с увеличением угла его поворота, а активная сила Рf, толкающая колесо, уменьшается. Следовательно, баланс сил и скорость поступательного движения колеса можно сохранить на повороте (оставив её такой же, как при прямолинейном движении) только за счет увеличения касательной силы тягиРкна ведущих колесах, то есть путем повышения момента двигателя без перехода на пониженную передачу.
Поворот возможен только в том случае, когда сцепление управляемых колес с почвой больше толкающего усилия:
G1φ > Рк,
где G1— вертикальная нагрузка, действующая на управляемые колеса;
φ— коэффициент сцепления колес с опорной поверхностью дороги.
Учитывая, что Рк =Рf/cosα(рис.8), можно записать:
φ > Рf/ G1cosα или:
φcosα >f , (2)
где f– коэффициент сопротивления качению колеса.
Из этого выражения видно, что поворот автомобиля может быть осуществлен только в том случае, если коэффициент сопротивления качению меньше произведению коэффициента сцепления на косинус угла поворота колес. Если сцепление колес с дорогой плохое и величина f больше этого произведения, то управляемые колеса будут двигаться юзом и поворот не может быть реализован, машина теряет управляемость. На скользкой дороге коэффициентыφиfблизки между собой, вследствие чего управляемость автомобиля снижается.
Ведущие колеса – передние управляемые.В этом случае поворачивающий момент в тяговом режиме работы создается силами тяги передних управляемых колес (рис.11).
Условие осуществления поворота автомобиля с передними ведущими колесами (по аналогии с рассмотренным выше случаем) будет иметь вид:
G1φ > Рк .
Разделив обе части неравенства на силу тяжести, приходящуюся на переднюю ось, получим:
φ > Рк /G1илиφ > f.
Если сопоставить это выражение с неравенством (2), то можно сделать вывод, что устойчивость по сцеплению с дорогой автомобиля с передними ведущими колесами в сравнении с автомобилем, имеющим задние ведущие колеса, выше и не зависит от радиуса (угла) поворота. У переднеприводного автомобиля не нарушается на повороте баланс сил толкающей силы Рки сопротивления качениюРf, как это имеет место у заднеприводного автомобиля. Заметим, что эти примеры рассмотрены без учета инерционных сил. Влияние этих сил на управляемость автомобиля будет отрицательным в обоих случаях.
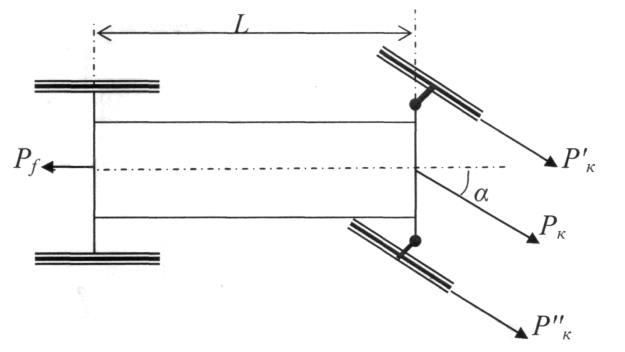
Рис.11. Схема сил, действующих на управляемые колеса переднеприводного автомобиля.
+Из рис.10 видно, что движение заднеприводной машины характеризуется толкающим режимом работы задней оси по отношению к передней. Для переднеприводного автомобиля (рис.11) тянущий режим обеспечивается передней осью. Из теории регулирования известно, что тянущие системы более устойчивы.
Влияние на поворот упругости шин
При осуществлении автомобилем поворота эластичная шина катящегося колеса подвергается деформации под действием боковой силы. На рис.12 изображено колесо сверху, причем контур abcdизображает отпечаток поверхности контакта шины с дорогой.
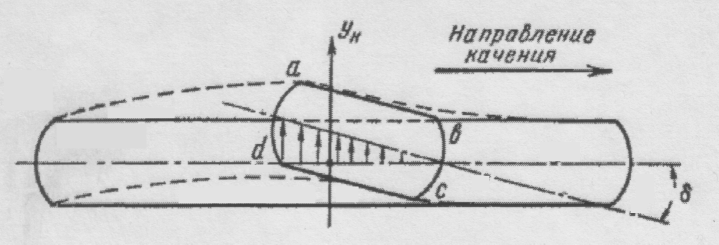
Рисс.12. Схема деформации эластичной шины под действием боковой силы.
Если боковая сила Ук, действующая на колесо, не превосходит силы сцепления колеса с опорной поверхностью, то из-за деформации эластичной шины будет иметь место явление еёбокового увода, то есть отклонение зоны контакта шины с опорной поверхностью от плоскости вращения колеса на уголδ. Так называемыйугол бокового увода.
Способность шины противостоять боковому уводу оценивают коэффициентом k сопротивления уводу:
k=Ук/ δ,кН/град,
где Ук— величина боковой реакции на колесе,кН;
δ— угол бокового увода,град.
Явление бокового увода проявляется преимущественно в случае движения на повороте с высокими скоростями на шинах, обладающих высокой эластичностью в боковом направлении. Поэтому указанное явление представляет интерес в основном для легковых автомобилей.
Величина коэффициента сопротивления боковому уводу kдля современных легковых автомобилей варьируется в пределах k= 250…750кН/град., а для грузовыхk= 1150…1650кН/град.
Как было показано выше, при жестких (недеформируемых в боковом направлении) колесах радиус поворота автомобиля однозначно определяется углом поворота управляемых колес α:R = L / α. С учетом эластичности шин кривизна (радиус поворотаR’) траектории движения автомобиля зависит не только от углаαповорота управляемых колес, но и от углов увода шин переднихδ1и заднихδ2колес (рис.13).
Вследствие изменения траектории движения мгновенный центр поворота автомобиля будет лежать не в точке О, а в точкеО’и радиус поворота определится соотношением (рис.13):
![]() .
.
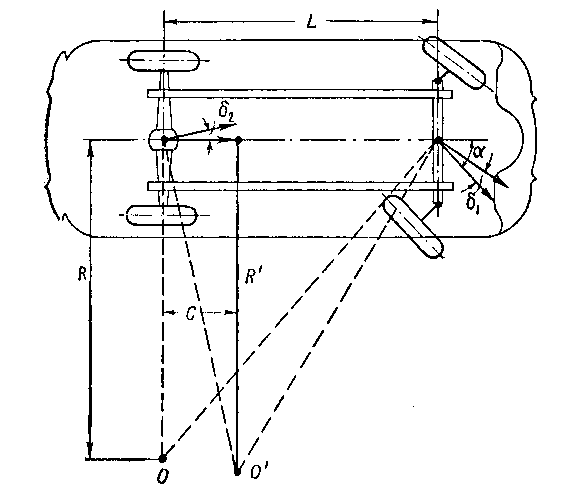
Рис.13. Поворот автомобиля с учетом боковой эластичности шин.
Учитывая, что углы увода относительно невелики (5…100) и угол поворота передних колес при высокой скорости движения также небольшой, приближенно считают:
![]() .
.
Для автомобиля с одинаковыми углами увода шин передних и задних колес δ1=δ2, (рис.13-а) радиус поворота будет иметь то же значение, что и при жестких колесах, то естьR’=R.
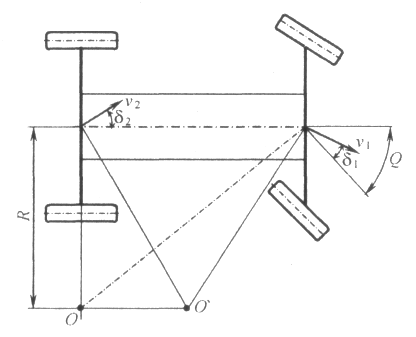
Рис.13-а. Схема поворота автомобиля с нейтральной поворачиваемостью (δ1=δ2).
Если δ1>δ2, тоR’>R, то есть поворот за счет увода шин будет осуществляться по более пологой кривой, чем при жестких колесах (рис.13-б).
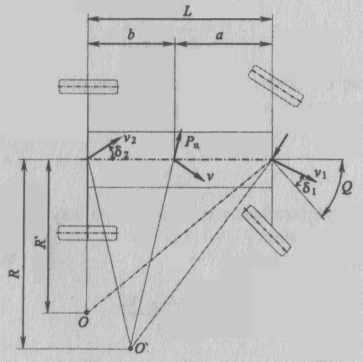
Рис. 13-б. Схема поворота автомобиля с недостаточной поворачиваемостью
(δ1> δ2).
Если δ1<δ2, тоR’<R, то есть поворот за счет увода шин будет осуществляться по более крутой кривой, чем при жестких колесах (рис.13-в).
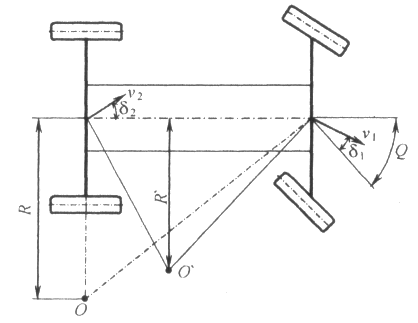
Рис. 13-в. Схема поворота автомобиля с избыточной поворачиваемостью (δ1 < δ2).
При движении автомобиля на повороте разность (δ2—δ1) зависит от коэффициентов сопротивления боковому уводу шин передних и задних колес к1ик2, а также от перераспределения центробежной силыРсмежду ними (соотношения продольных координатаиbцентра массы автомобиля, см. рис.2), обуславливающего соответствующие боковые усилияУ1иУ2на колесах:
![]() ;
;![]() ;
;;
![]() .
.
Соотношения углов увода шин передних и задних колес автомобиля обуславливают его характеристикуповорачиваемости, которая может быть: 1)недостаточной(рис.13-б) и 2)излишнейилиизбыточнойповорачиваемостью (рис.13-в).
Например, при движении на прямом участке дороги автомобиль с недостаточной поворачиваемостью(δ1 > δ2) под действием боковой силы (например, ветра)Рw вследствие бокового увода шин стремится совершить поворот относительно мгновенного центра поворотаО2 (рис.14 — б).
Однако в этом случае движение автомобиля остается устойчивым при любых скоростях благодаря тому, что возникающая центробежная сила Рснаправлена в сторону, противоположную боковой силеРw. Это создает боковой увод шин в направлении, обратном уводу, вызванному действием силыРw.
Когда автомобиль обладает излишней поворачиваемостью(δ1< δ2), даже при его движении на прямолинейном участке боковой увод шин изменяет направление движения автомобиля так, что центр поворотаО1 располагается со стороны действия боковой силыРw(рис.14— а). Движение автомобиля при этом является неустойчивым вследствие того, что направление боковой силы и центробежной силы совпадают (рис.14 — а). При чем, с ростом скорости автомобиля эта неустойчивость будет проявляться более интенсивно, так как центробежная сила возрастает пропорционально квадрату скорости.
Самопроизвольное уменьшение радиуса поворота автомобиля при этом можно прекратить, если повернуть рулевое колесо в сторону, противоположную повороту машины.
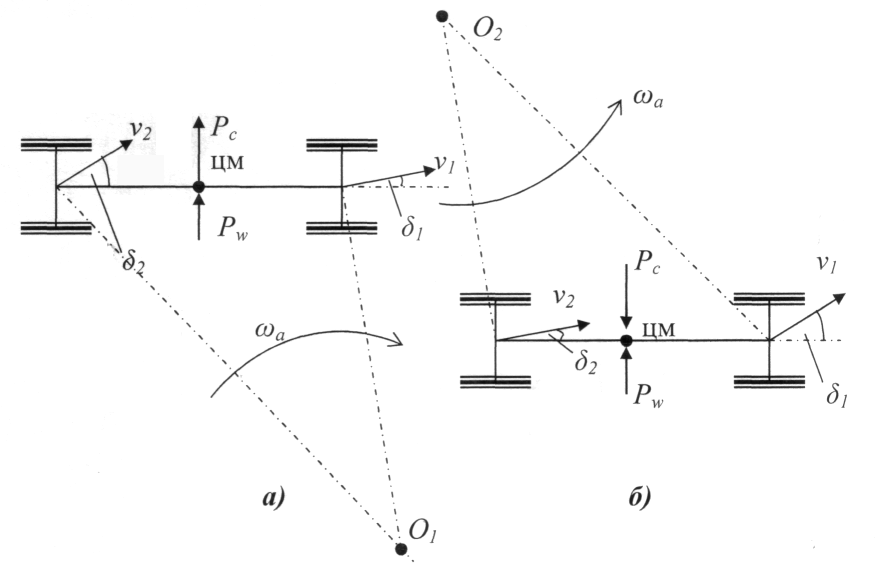
Рис.14. Схема увода автомобиля под действием боковой силы ветра Рw:
а) – автомобиль с излишней поворачиваемостью (δ1< δ2);
б) – автомобиль с недостаточной поворачиваемостью (δ1 > δ2).
Грузовые автомобили со сдвоенными задними колесами обладают недостаточной поворачиваемостью, так как боковая деформация (угол увода) передних колес больше (δ1 > δ2). Для легковых автомобилей с целью обеспечения недостаточной поворачиваемости подбирают соответствующим образом давление в шинах передних и задних колес, распределяют вес между передним и задним мостами, изменяют конструкцию подвески автомобиля.
Большое влияние на управляемость оказывает боковой (особенно порывистый) ветер. Сила ветра Рwприложена в точкес, представляющей собойбоковой центр парусностиили точку приложения равнодействующей аэродинамических сил. Мысленно перемещая точку приложения силы бокового ветра вдоль автомобиля, можно найти такое её положение, при котором углы бокового увода шин передних и задних колес будут равны между собойδ1 = δ2. Это положение точки носит названиецентра боковых реакцийУ1иУ2. Рассмотрим три варианта расположения бокового центра парусности.
- Расположение бокового центра парусности позади центра боковых реакций обуславливает условие, при котором имеет место неравенство δ1< δ2, и составляющая центробежной силыРс, перпендикулярная продольной оси автомобиля, действует в ту же сторону, что и сила ветра. Это приводит к ухудшению управляемости автомобиля, который в этом случае по своим свойствам аналогичен автомобилю, имеющего характеристику излишней поворачиваемости.
- Предположим, что боковой центр парусности находится впереди центра боковых реакций. Тогда δ1 > δ2и боковая составляющая центробежной силыРснаправлена в противоположную сторону по отношению к силе ветраРw. Эти силы создают момент, нарушающий управляемость автомобиля, хотя последний и будет в данном случае иметь недостаточную поворачиваемость.
- Третий возможный случай – совпадение бокового центра парусности и центра боковых реакций. В этом случаеδ1 = δ2и автомобиль имеет наилучшую управляемость.
Для улучшения аэродинамической устойчивости автомобиля его боковой цент парусности иногда искусственно смещают назад, благодаря применению специальных килейв задней части автомобиля, увеличивающих боковую поверхность. Аэродинамические кили обычно применяются на гоночных автомобилях.
+Большинство современных автомобилей имеют недостаточную поворачиваемость δ1 — δ2= 1…1,50при относительной величине центробежной силыРс /G= 0,3…0,4. Недостаточная поворачиваемость, выходящая за указанные пределы, может затруднить выполнение поворота, повышает сопротивление качению и износ шин. Боковой увод шин на 3…50повышает сопротивление качению в 1,5…2,5 раза.
На боковой увод шин влияет и конструкция подвески автомобиля. При независимой подвеске, выполненной из двух сочлененных поперечных рычагов (наиболее типичная конструкция), на повороте происходит наклон колес и кузова до 5…70, что соответствует боковому уводу шин примерно на 10.
Подвеска на одном поперечном рычаге вызывает наклон колес в сторону противоположную действия боковой силы, и, следовательно, уменьшает боковой увод шин. Зависимая подвеска дает минимальный наклон колес.





