
Под управляемостью понимают способность автомобиля двигаться по заданной траектории с требуемой точностью при воздействии водителя на механизм управления.
Управляемость обусловлена двумя свойствами машины:
- курсовой устойчивостью при неуправляемом движении;
- реакцией на управляющее воздействие водителя.
Кинематика поворота автомобиля
Существуют следующие способы поворотаколесной машины.
- Поворот передних управляемых колес.
- Совместный поворот передних и задних управляемых колес.
- Поворот бортом без управляемых колес за счет отключения передачи вращающего момента на правые или левые неуправляемые колеса и торможение колес, внутренних по отношению к кривой поворота. Поворот без управляющих колес может быть осуществлен созданием разных скоростей вращения колес левого и правого бортов машины (по аналогии с гусеничной машиной).
- Поворот путем комбинации рассмотренных выше способов.
- Поворот за счет поворота передней части остова машины при сочлененной раме.
Третий способ поворота (бортом) имеет смысл использовать на машинах со всеми одинакового размера ведущими колесами большого диаметра. При этом упрощается привод к ведущим колесам и компоновка передних колес, однако, повышается износ шин.
На рис.8 схематически показан поворот колесной машины с управляемыми передними колесами (наиболее типичный вариант).
Мгновенный цент поворота О1 находится в точке пересечения перпендикуляров к векторам скоростей движения колес. Расстояние от центра поворотаО1до оси заднего моста автомобиля принято называть радиусом поворотаR = L·ctg α. При повороте передних управляемых колес машины на одинаковый угол такое пересечение будет невозможно, так как перпендикуляры к векторам скоростей этих колес будут параллельны.
В этом случае движение на повороте сопровождалось бы скольжением управляемых колес вбок, управляемость машины ухудшалась бы, а износ шин и сопротивление движению возросли.
Как следует из рис.8, чистое качение управляемых колес машины без скольжения при движении на криволинейных участках возможно лишь в том случае, если между углами поворота внутреннего θв(ближнего к центру поворота) и внешнегоθн(удаленного от центра поворота) колес будет следующее соотношение:
ctg θв = ОС/ВС;ctg θн = ОD/АD; разность этих выражений:
![]() ,
,
где θвиθн– соответственно углы поворота внутреннего и внешнего управляемых колес;
l– расстояние между осями шкворней поворотных цапф (приближенно может быть принято равным ширине колеиВ);
L– база машины.
Выполнение этого условия достигается с помощью шарнирного четырехзвенника, называемого рулевой трапецией, соединяющей между собой управляемые колеса. Подбирая соответствующие значения параметров рулевой трапеции, геометрию элементов и кинематику в целом, получают соотношение между угламиθвиθн, близкое к теоретическому. Однако рулевая трапеция не может обеспечить точно заданное (теоретическое) соотношение между углами поворота колес при различных их величинах, в тех пределах, в которых это необходимо на автомобилях.
Отклонение от теоретических значений углов поворота друг от друга тем меньше, чем правильнее выбраны размеры звеньев, составляющих рулевую трапецию.
При крутых поворотах отклонение действительных углов поворота колес от теоретических – наибольшее. Однако и в этом случае по соображениям безопасности (надежности управления) оно не должно превосходить 1,50.
Установим зависимость между радиусом поворота R, базой машиныLи углом поворота управляемых колесα. Если пренебречь небольшим отличием углов поворота управляемых колес и считать, чтоθв=θн=θ, то, воспользовавшись схемой рис.8, можно записать следующую зависимость:
![]() .
.
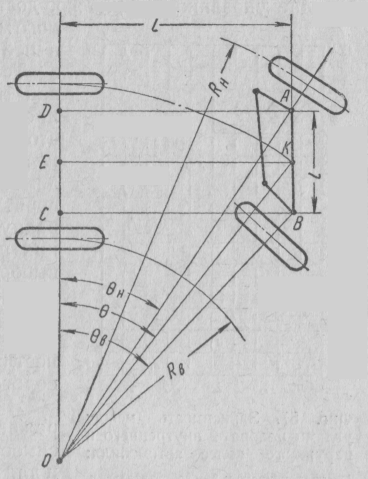
Рис.8. Схема поворота автомобиля с управляемыми передними колесами.
Следовательно, угол поворота колес при движении по кривой определяется радиусом её кривизны. Для малых значений угла α формула примет вид (tg θ≈θ):
![]() ,
,
где θ— средний угол поворота управляемых колес в радианах.
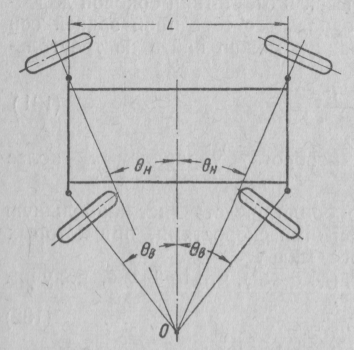
Рис.9. Схема поворота машины с задними и передними управляемыми колесами.
Уменьшение радиуса поворота может быть получено в том случае, если все колеса машины будут управляемы (второй способ поворота), тогда (рис.9):
Стабилизация управляемых колес
Управление машиной значительно облегчается, если управляемые колеса обладают хорошей курсовой стабилизацией, то есть способностью сохранять (само устанавливаться) нейтральное положение, соответствующее прямолинейному движению, и возвращаться к нему после отклонения. Благодаря стабилизации уменьшаются колебания управляемых колес и нагрузки, действующие на рулевое управление. Стабилизации управляемых колес способствуют следующие три фактора:
- боковой наклон шкворней поворотных цапф (весовая стабилизация);
- продольный наклон шкворней поворотных цапф (скоростная стабилизация);
При боковом наклоне шкворней поворотных цапф (рис.15) всякое отклонение управляемых колес вызывает некоторый подъем передней оси. Будучи выведенным из нейтрального положения, колесо стремиться само установиться, то есть занять исходное (нейтральное) положение под действием веса части автомобиля (отсюда и появление термина «весовая стабилизация»), приходящегося на переднюю ось, что способствует сохранению положения управляемых колес, соответствующего прямолинейному движению автомобиля.




 α Рис. 15. Схема весовой стабилизации управляемого
α Рис. 15. Схема весовой стабилизации управляемого



 колеса за счет поперечного наклона
колеса за счет поперечного наклона


 шкворня.
шкворня.
При продольном наклоне шкворня (рис.16) кинематика управляемого колеса аналогична рояльному колесу.



 γ
γ
v Рис. 16. Схема скоростной стабилизации управляемого



 колеса за счет наклона шкворня в
колеса за счет наклона шкворня в


 продольной плоскости.
продольной плоскости.
 rк
rк



 а Rz
а Rz
При движении автомобиля на повороте возникает момент от боковой силы Rz, который всегда стремиться вернуть его в нейтральное положение:Мстаб. = Rzа=Rzrкsinγ(скоростная стабилизация).
Угол продольного наклона шкворней поворотных цапф γобычно не превышает 2,50, а для многих современных автомобилей равен 0.
Развал и сходимость управляемых колес автомобиля
Сами колеса машин также имеют установочные углы, называемые углами развала β и схода.
Угол развалаβпереднего управляемого колеса предназначен:
- предотвратить возможность обратного наклона колеса под действием весовой нагрузки за счет выборки зазоров и деформаций в деталях передней оси и передней подвески;
- создать осевую составляющую от силы веса для удержания колеса на оси поворотной цапфы (поджатие колеса к опорному коническому подшипнику);
- снизить нагрузку в рулевом приводе и уменьшить усилие на рулевом колесе за счет уменьшения плечас1(рис.17-а).
Угол развала βуправляемых колес для современных автомобилей не превышает 1,5…40(рис.17-а). Однако наклон колеса к поверхности качения вызывает боковой увод его в сторону наклона (по аналогии качения детского обруча): левый наклон вызывает увод налево, правый наклон – направо. При этом происходит частичное проскальзывание наклоненных к вертикальной плоскости колес, сила сопротивления качению увеличивается, а износ шин возрастает.
Наличие угла схода(сходимость колес в горизонтальной плоскости) снижает напряжения в зоне контакта колес с опорной поверхностью, вызванные развалом. Наличие угла сходимости колес вызывает их качение с боковым уводом, причем угол увода равен углу сходимости.
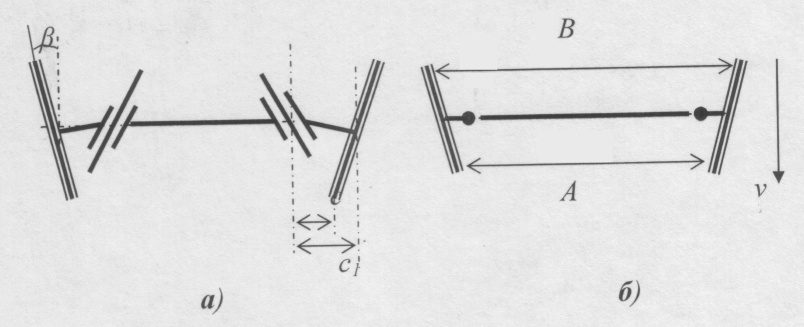
Рис.17. Развал (а) и схождение (б) управляемых колес.
+Установлено, что наименьшие напряжения в зоне контакта шины с опорной поверхностью будут иметь место в том случае, если угол сходимости составляет 0,15…0,20 от угла развала. Для современных автомобилей степень сходимости управляемых колес оценивается разностью расстояний сзади Ви впередиАколес по отношению к направлению вектора скоростиvдвижения автомобиля (рис.17-б):В – А= 1…4мм.
Автомобиль, имеющий хорошую стабилизацию управляемых колес, автоматически сохраняет прямолинейное движение в заданном направлении без затраты усилий со стороны водителя. Отклонение колес от нейтрального положения, вызванное дорожными неровностями, у этих автомобилей быстро гасятся в результате автоматического возвращения колес к нейтральному положению.
Предусмотренные для каждой конструкции углы установки шкворней и колес должны строго выдерживаться, иначе неизбежно ухудшение управляемости и повышенный износ шин.
Контрольные вопросы.
- Что такое коэффициент сцепления колеса с опорной поверхностью? От чего он зависит и что определяет?
- Как зависят опорно-сцепные свойства автомобиля от характера распределения его веса по осям?
- Как влияют конструктивные параметры шины на проходимость автомобиля?
- Что такое опорно-сцепная проходимость автомобиля? Перечислите параметры, её определяющие.
- Что такое профильная проходимость автомобиля? Перечислите параметры, её определяющие.





